
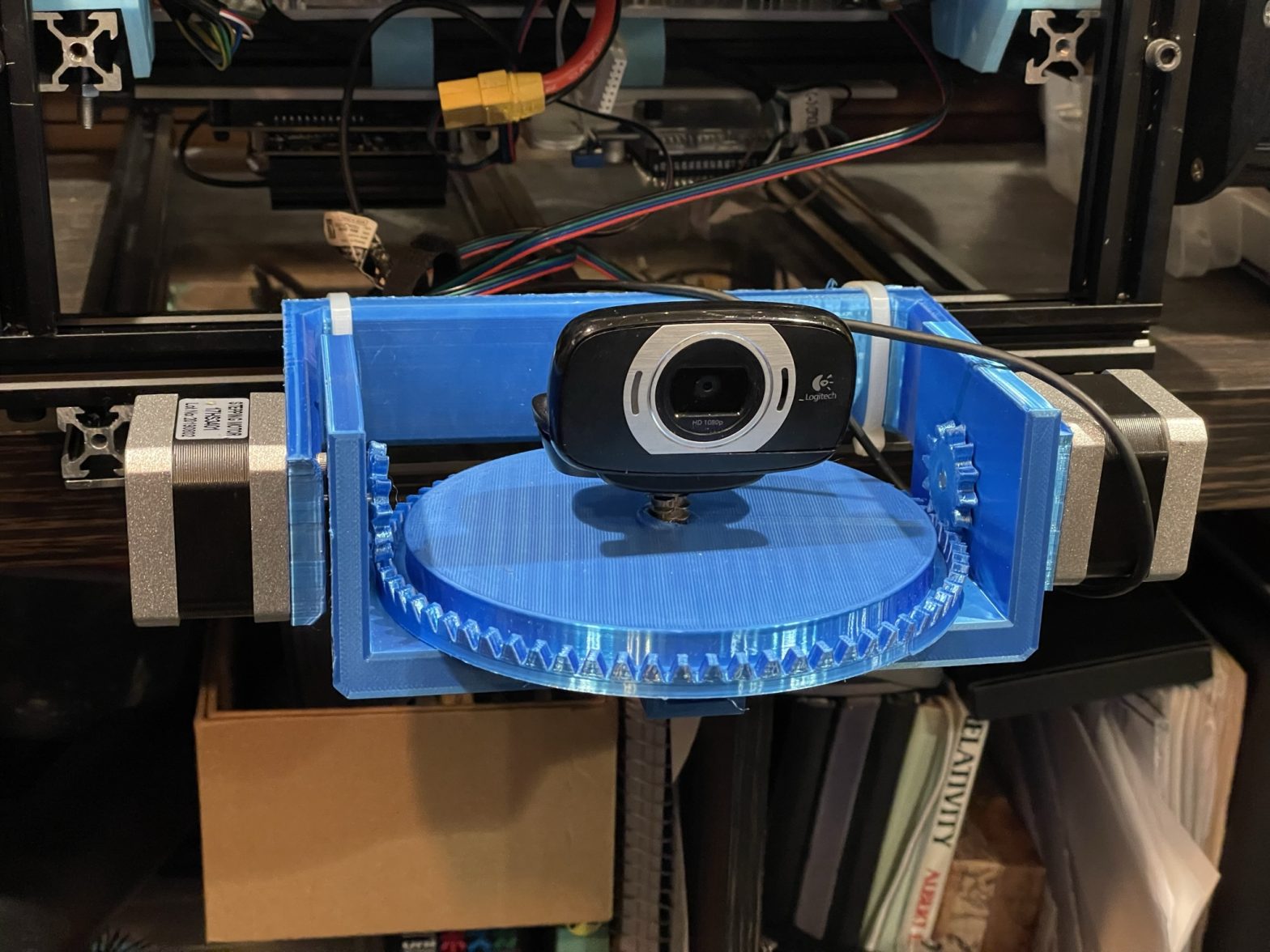
Recently, I decided to take on the challenge of building a simple, yet functional camera gimbal using a 3D printer and two stepper motors. My goal was to create a gimbal with as few parts as possible while still achieving 2 degrees of freedom (2Dof). I was able to design and print all of the necessary parts for my gimbal, and by incorporating just two stepper motors, I was able to achieve both pan and tilt functionality with minimal parts using a differential drive with a few spur gears. I haven’t programmed it yet, but if you want to give it a try (and also add in limit switches I forgot on V1) I posted the files on Thangs and Github.

Parts
This V1 design uses:
- 5 MR95ZZ bearings,
- 1 5mmX25mm rod
- 2 NEMA 17 Steppers.
The STLs that need to be printed can be found at either link. The parts that you see were printed on an Ender 3 Max and default settings for 0.16mm layer height with the Middle tolerance setting. The parts should be able to be pressed on with a vice or something and might not need glue.
Thangs Link:
https://thangs.com/mythangs/file/614031
Github Link:
https://github.com/skavrx/3D-Printed-Gimbal


Reply